探索者 · 训练师

机械原理创新平台 电子创新设计实验箱 机器人检测与控制 机器人创新组件高级 智能机器人开发平台 智能仓储流水线 全地形小车竞赛场地 智能物流搬运场地 智能机器人开发套装 人工智能机器人平台 |
一、设备概述
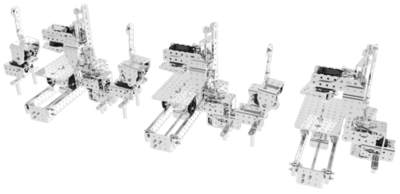
MIK-PD03是一款全面支持机械原理创新课程的器材,可开展机械原理模块认知、机械原理模块应用、机械原理模块创新、创新实验课、创新实践活动等。本设备包含大量标准机械零件,平板、折弯、杆、齿轮、齿条、偏心轮等机械零件,可组装典型机械原理结构,巩固机械原理课程所学知识,更鼓励学以致用,设计机械原理的应用机构。原理知识点包括连杆组、凸轮、轮系等。提供AVR单片机、传感器,控制模块、制动模块搭配,已满足更高教学需要。学校可根据不同年级、不同层次和不同课程实验目的开设不同的实验课程,也可根据需要扩展其他配件,扩展实验平台的性能和功能。
二、设备特点
本设备机械零件大部分采用铝镁合金材质,国际标准通用式设计,可任意搭配,反复拆装,兼容常见标准零件、自加工零件等;电子部件采用标准化、开放式设计,可兼容常见电子接口和编程环境,开放全部技术资料、设计文件等。支持常规实验、二次开发和创新研究。开放的硬件、网络、软件体系,能够兼容配件;集成了常见机械传动装置,可方便教学,方便设备管理,有助于学生理解机械原理;引入前沿概念的控制模块、方法、概念,如开源硬件Arduino等项目,紧跟国际潮流,保证创新的时效性;为用户提供了广阔的创新实验开发空间,启发学生的创新思维,锻炼动手能力,既可开展课程实验,也可开展小组兴趣活动;提供实验指导书,结构3D文件、在线数据库,电路原理图,源代码,库函数,通信协议等。支持逆向教育、CDIO四步教学法等教学理念。
三、可支持的课程:
包含3阶段教学内容,通过课程训练可以使学生快速了解与掌握常用运动机构,培养学生进行运动方案设计的能力,并拓展其设计思路。
四、可组装样机案例:
提供50个以上各类机构案例,涵盖机械原理传统教学、创新教学。
基础型运动机构25个:
典型四杆机构、车用雨刮器连杆组、飞机起落架连杆组、起重机连杆组、窗户开闭连杆组、摆角放大连杆组、铸锭送料连杆组、磕头机连杆组、卷扬机制动安全装置。气缸活塞往复运动模型、滚子移动从动杆盘状运动模型、平底移动从动杆盘状运动模型、滚子摆动从动杆盘状运动模型、平底摆动从动杆盘状运动模型、等宽凸轮运动模型、等径凸轮运动模型。齿轮机构运动模型、齿轮组运动模型、齿轮齿条运动模型、锥齿轮传动模型等。
综合型运动机构30个:
传统转向控制机构、四轮转向控制机构、转向器转向控制机构。连杆组伸缩机构、连杆齿轮伸缩机构、垂直连杆板伸缩机构、齿轮齿条组伸缩机构等。凸轮组膨胀机构、连杆组膨胀机构、摆角放大机构运动模型搭建等。滑块平移机构、连杆组平移机构、齿轮齿条平移机构。棘爪单向传动机构、单向摩擦单向传动机构。蒸汽机机构、链条传动机构、空间连杆共源驱动。平动连轴节、万向节传动、拨块传动。齿轮平动连杆手爪、连杆手爪、齿轮手爪、连杆滑块手爪。飞剪式运动机构、平动连轴节运动机构、行星轮系等。
工业型运动机构项目3个
模拟车床加工项目、模拟铣床加工项目、模拟立体仓库运动项目
五、电子元器件
电子硬件及软件部分均采用国际通用的Arduino开源机器人软件,提供C语言结构的代码、图形化双界面,提供丰富的例程,让学生轻松的参考学习。主控板具有示教编程功能,可执行脱离电脑的、快速的示教编程,让不同水平的学生轻松编程。
| 第一阶段基础型运动机构方案设计实验 | ||
平面连杆机构 | 典型四杆;磕头机连杆组;车用雨刮器连杆组;飞机起落架连杆组;铸锭送料连杆组;起重机连杆组;窗户开闭连杆组;飞剪式运动机构搭建;卷扬机制动安全装置模型; | 采用顺序思维教学,从最基础的原理机构向前衍生各种机构,并指出各衍生机构的用途。 |
凸轮机构 | 气缸活塞往复运动模型;滚子移动从动杆盘状运动模型;平底移动从动杆盘状运动模型;滚子摆动从动杆盘状运动模型;平底摆动从动杆盘状运动模型;等宽凸轮运动模型;等径凸轮运动模型; | |
| 齿轮机构 | 齿轮机构;齿轮组;齿轮齿条机构;锥齿轮传动; | |
| 轮系机构 | 定轴轮系运动模型;太阳轮输入行星架输出行星轮系运动模型;差速器运动模型;行星轮系平行圆周运动模型; | |
| 棘轮机构 | 典型棘轮;三爪闸机机构 | |
| 第二阶段综合型运动机构方案设计实验 | ||
| 底盘的转向 | 传统转向控制机构;四轮转向控制机构;杠杆转向控制 | 采用逆向思维教学,指定某功能或运动轨迹,设计可以将其实现的各种方案。先举几个例子做引导,然后根据第一阶段学过的内容,综合设计。 |
| 伸缩 | 连杆组伸缩机构;连杆齿轮伸缩机构;垂直连杆板伸缩机构;齿轮齿条组伸缩机构; | |
| 缩放 | 凸轮组膨胀机构;连杆组膨胀机构;摆角放大机构; | |
| 平动 | 滑块平移机构;连杆组平移机构;齿轮齿条平移机构;丝杠平移机构;带传动平移机构;齿轮连杆平移机构 | |
| 共源驱动 | 齿轮组;蒸汽机机构运动方案模型;链条传动机构;空间连杆共源驱动机构; | |
| 偏心传动 | 偏心联轴机构;花键联轴机构;万向节传动机构; | |
| 机械手爪(相对运动) | 齿轮连杆平动手爪;连杆手爪;齿轮手爪; | |
| 间歇运动 | 纵擒机构;拨块间歇机构; | |
| 单向传动 | 棘爪单向传动机构运动模型;单向摩擦单向传动机构 | |
| 机械臂伸屈运动 | 连杆组机构;关节机构;杠杆关节机构;双关节并联机构 | |
| 综合实训 | ||
| 车床 | 连杆滑块平移、丝杠平移、带传动 | 工业级项目,将整机拆解分模块设计 |
| 铣床 | 丝杠平移、连杆滑块平移 | |
| 立体仓库 | XY平台、连杆滑块平移 | |
| 第三阶段创新型运动机构方案设计实验 | ||
| 车辆底盘相关 | 直线行进,灵活转向,自适应地形,全向移动,翻越障碍及楼梯等 | 产品级题目,从整体功能出发,设计整体样机。 |
| 生产机械相关 | 搬运,传递,加工,机床、流水线,作业设备等 | |
| 工程机械相关 | 移动,稳定移动,负重,挖掘、搬运 | |
| 仿生类概念机械相关 | 各类仿生概念机械用于生产、工程等机械 | |
简单易用的图形化C语言界面
经典的C语言代码界面
设备特点
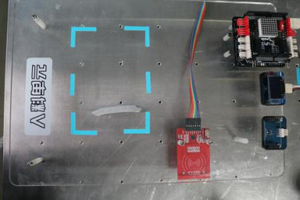
模块化电子创新套件EID-COC002是用于大学生电子设计实践的教学设备,主要针对大学生电子设计竞赛的训练或日常实践训练,对学生实践能力培养具有重要作用。该实验箱包含51单片机、Arduino开源硬件单片机、ARM嵌入式芯片设备,以及面包板、杜邦线、传感器、输入设备、输出设备、通信模块等各类电子模块等电子设计常用资源,提供31个电子设计实例,既可以满足常规教学、实验需要,又可以满足开发需要。
设计实例
学生可利用器材制作:
包括智能小车、自制数字示波器、RFID识别门禁系统、自制电子温度计、自制签到记录仪、自制空气净化器、蓝牙智能家居、超声波测量身高装置、智能手表、自制计步器、自制闹钟、NRF航模无线遥控小车等提供制作教程及例程代码
可支持课程
包括智能小车、自制数字示波器、RFID识别门禁系统、自制电子温度计、自制签到记录仪、自制空气净化器、蓝牙智能家居、超声波测量身高装置、智能手表、自制计步器、自制闹钟、NRF航模无线遥控小车、智能分拣系统、涂装分拣系统、智能平衡车、自制游戏机、WiFi视频监控平台、电子罗盘、串口通信等。提供制作教程及例程代码。
| 教学点 | 课程 | 详细说明 |
| 课前准备 | 绪论 | 主控板简介 Bigfish扩展板简介 传感器简介 认识Arduino |
| 入门项目 | 实验1 | Blink——控制LED灯 |
| 实验2 | 电机及入门操作——电动风扇 | |
| 实验3 | 伺服电机及入门操作—— 电动门(X型伸缩门) | |
| 实验4 | 传感器入门操作1——自动闸机门 | |
| 实验5 | 传感器入门操作2——超声波身高测量装置 | |
| 实验6 | 传感器入门操作3——商店迎宾装置 | |
| 实验7 | 传感器入门操作4——防盗报警 | |
| 实验8 | 传感器入门操作5——蓝牙家具(智能垃圾桶) | |
| 实验9 | 传感器入门操作6——WiFi无线控制云台 | |
| 智能穿戴设备 | 实验10 | 防颈椎病护额/姿势矫正器——加速传感器的应用 |
| 实验11 | 智能手表——加速度传感器、OLED的应用 | |
| 实验12 | 计步器——加速度传感器的应用 | |
| 智能家居设备 | 实验13 | 履带模块组装与控制 |
| 实验14 | 智能光感台灯——光强传感器的应用 | |
| 实验15 | 电子温湿度计——温湿度传感器、OLED的应用 | |
| 实验16 | 空气净化器——烟雾传感器的应用 | |
| 实验17 | 防盗视觉跟踪系统——摄像头、WiFi的应用 | |
| 实验18 | 游戏机(贪吃蛇)——摇杆 | |
| 实验19 | 闹钟——OLED、蜂鸣器的应用 | |
| 实验20 | 智能存钱罐——近红外传感器的应用 | |
| 智能车主题 | 实验21 | 避障小车——超声波传感器的应用 |
| 实验22 | AGV升降小车——寻迹、升降小车 | |
| 实验23 | 蓝牙遥控器 | |
| 实验24 | 航模遥控车——NRF无线 | |
| 实验25 | 汽车里程表——红外编码器 | |
| 实验26 | 自动停泊小车——超声测距、近红外、黑标传感器的综合应用 | |
| 实验27 | 定向小车——陀螺仪的应用 | |
| 智能工业主题 | 实验28 | 门禁系统——4×4键盘、RFID识别的综合应用 |
| 实验29 | 数字示波器——超声测距、OLED的综合应用 | |
| 实验30 | 智能分拣系统——红外测距传感器的应用 | |
| 实验31 | 涂装分拣系统——颜色识别传感器的应用 |
检测与控制综合系统平台EID-BM-02A 含单片机、自动控制、通讯、传感器等多个方向的实验,另配置四台检测控制对象:包含履带机器人底盘,三自由度机械臂,桌面级机械臂,基于视觉分拣的检测线,可批量装备机电、自动化、电子信息实验室。可多个学科共用实验设备,提高实验室利用率。提供《机器人检测与控制实验》指导书2本,60个实验项目,授课老师无需编写教案,根据教程即可上课。以综合实验把各专业课程知识内容串联起来,达到培养学生的机电系统综合设计、动手、编程等综合能力的目的。模块化实验箱设计,一套装置实现多个实训项目。
通过本课程的学习,使学生在知识和技能上达到如下目标:
1、掌握机器人系统中常用的检测方法和各种传感器的使用。(对应毕业要求指标点1-2,1-3)
2、了解机器人中单片机控制技术,掌握单片机控制基础实验方法:通过实验掌握电机驱动技术(对应毕业要求指标点1-2,1-3,1-5)
3、通过实际线路搭接,掌握常用语移动机器人中的基础通信和方法。(应对毕业要求指标点1-2,1-3)
4、综合机器人检测、控制、通信、视觉多学科专业知识,通过综合性实验,能够在检测对象上实现多种功能;掌握机器人基本软硬件架构和相 应功能模块的初步开发:培养学生综合能力。(应对毕业要求指标点2-1,2-2,3-1)
5、了解桌面级机械臂运动控制方法,了解机械臂正解与逆解控制原理与机械臂应用,了解ROS机器人操作系统基础。(对应毕业要求指标点1-2、 1-3)
实验箱:
硬件配置:
主控:stm32主控板3块,树莓派主控板1块(其中桌面级机械臂包含树莓派主控、stm32主控板各1块)
机电系统常用传感器:22种,触碰、触须、闪动、声控、白标、灰度、颜色识别、红外、加速度、超声波、RFID、霍尔、红外测距、温度、语音识别、颜色识别、摄像头、GPS、烟雾、热释电等;
4种执行器:模拟舵机、数字舵机、直流电机、步进电机;
3种通信模块:蓝牙通信模块、wifi通信模块、NRF无线通信模块;
6种常见单片机应用:4x4键盘、双通道A/D、8位D/A、RS-232串行通讯、4位8段数码管、128*64点阵OLED、8*8LED阵列等;
2种共不同形状木质工件:圆形工件3个,方形工件3个。
综合实验对象:
履带机器人底盘一台,尺寸约:17cm×15cm×5cm,结构件采用铝镁合金零件,包含2个红外编码器;
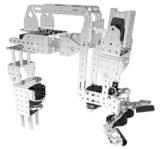
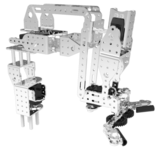
三自由度机械臂一台,尺寸约:19cm×9cm×10cm,结构件采用铝镁合金零件,包含3个标准舵机;
桌面级机械臂一台,最大展开尺寸约:200mmx150mmx400mm,工作半径:220mm,自重:2kg,主控板:集成树莓派、STM32 共两块控制板,数字舵机驱动,配套气动吸盘、电磁铁、笔架等末端执行器;
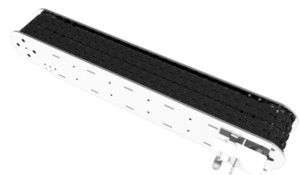
基于视觉分拣的检测线一台,尺寸约:75 cm×35 cm×15cm,采用铝镁合金零件,塑料月牙链板,包含1个直流电机。
实验大纲:
机器人检测与控制综合实验大纲 | |
单片机综合实验 | STM32控制板认知实验 编程环境搭建实验 创建库函数工程实验 SYSTEM文件移植实验 Bigfish扩展板认知实验 LED灯闪烁实验 按键控制LED灯实验 PWM实验 ADC实验 DAC实验 RTC时钟实验 外部中断实验 定时器中断实验 串口通信实验 IIC通信实验 OLED实验 矩阵键盘实验 数码管实验 OLED显示器实验 |
电机综合实验 | 数字量直流电机控制实验 模拟量直流电机控制实验 舵机控制实验 插值法控制舵机 数字舵机控制实验 步进电机控制实验 |
传感器综合实验 | TTL传感器实验 DHT11温湿度传感器实验 HC-SR04超声测距传感器实验 红外测距传感器实验 气体传感器实验 霍尔传感器实验 热释电红外传感器实验 压力传感器实验 电子秤实验(综合) 颜色识别传感器实验 摇杆实验 加速度检测实验 编码器检测实验 |
通信模块综合实验 | 蓝牙无线通信实验 NRF无线通信实验 GPS无线通信实验 WIFI无线通信实验 |
检测与控制综合实验 | 底盘运动控制实验 PID运动控制实验 机械臂运动控制实验 颜色分拣实验 基于视觉识别的分拣综合实验-颜色识别 基于视觉识别的分拣综合实验-形状识别 |
桌面级机械臂综合实验 | 机械臂结构设计与分析-测绘 机械臂结构组装 机械臂正运动学控制电磁铁搬运 机械臂逆运动学控制气动搬运 机械臂绘图实验 机械臂运动仿真控制 |
机器视觉综合实验 | 视觉-颜色识别 视觉-形状识别 视觉-二维码识别 视觉-机械臂目标颜色视觉追踪 视觉-机械臂目标形状视觉追踪 |
设备特点
高级版Rino-MX201包含20种机器人模块,以及50种创新示例,构形更加丰富。三主控板方案,其中包括一款ARM Cortex M3芯片主控板。传感器15种,包括了语音识别、颜色识别、CCD摄像头等,通信方式包括蓝牙、NRF、WiFi无线通信。包含一款手柄扩展板,可实现遥控和示教编程。完全包含标准版Rino-MX101的全部零部件及教学内容,让学生可以自由搭建更多、功能更强大的机器人。采用Arduino开源编程系统,C语言图形化双界面,教学更加方便。
可支持课程
机器人机构设计、机器人机构创新设计、模块化机器人的设计与实现、机构组成建模、机电控制基础、机器人技术基础、工业机器人基础、嵌入式技术在机器人上的应用、自主机器人程序设计、单片机原理、自动控制原理、机器人运动学、多自由度机器人组装与控制、典型机器人构型设计等。 软件采用国际通用的Arduino开源机器人软件,提供C语言结构的代码、图形化双界面,提供丰富的例程,让学生轻松的参考学习。并具有示教编程功能,可执行脱离电脑的、快速的示教编程,让不同水平的学生轻松编程。
课程与实验
提供并支持《模块化机器人创新教学与实践》教材一本,书号:ISBN978-7-5603-6193-2。
提供4本电子版《实验教程》。《实验教程》提供80节以上实验课,总课时150课时。
1个闪存盘(U盘),提供教材电子文档;提供编程环境所需全部软件,包括C语言编程软件、图形化编程插件、驱动程序、示教编程程序等;提供所有电子模块的电路文件,可用Protel打开;全部样机的3D文件,STP格式,可用于PRO/E、SolidWorks等软件搭建机器人虚拟样机,也可用于ANSYS、UG等软件进行运动学和动力学仿真。提供实验范例的全部源程序,便于教学使用。提供100个样机视频。
| 章节 | 内容 | 详细说明 |
前言 | 创新思维引导 | 1. 教程思路说明 2. 设计方法理论 3. 创新的流程 4. 几种有效的创造技法 |
第一章 | 底盘转向机构设计案例 | 1.1 几种能够进行差速转向的底盘 |
1.2 几种具有转向机构的三轮底盘 | ||
| 1.3 一种四轮底盘转向机构 | ||
| 1.4 一种多自由度全向移动底盘 | ||
第二章 | 收集装置设计案例 | 2.1 几种抓取物品的装置(机械爪) |
| 2.2 一种铲式收集装置 | ||
| 2.3 一种滚筒收集装置/机器人 | ||
| 2.4 其他收集装置举例 | ||
第三章 | 机械臂设计案例 | 3.1 几种串联式机械臂 |
| 3.2 一种连杆串联混合机械臂关节和机械臂 | ||
| 3.3 几种杠杆式机械臂 | ||
第四章 | 仿生机器人设计案例 | 4.1 一种曲柄摇杆仿生行走机器人 |
| 4.2 几种偏心摇杆仿生行走机器人 | ||
| 4.3 几种关节串联仿生行走机器人 | ||
| 4.4 一种连杆关节串联仿生行走机器人 | ||
| 4.5 一种抽象仿生机器人 | ||
第五章 | 全地形机器人设计案例 | 5.1 采用大脚轮的设计方案 |
| 5.2 几种采用悬挂系统的设计方案 | ||
| 5.3 几种采用履带系统的设计方案 | ||
| 5.4 一种加入了攀爬机构的机器人方案 | ||
| 5.5 采用异形轮的全地形机器人方案 | ||
| 5.6 一种全地形月球车底盘 | ||
| 附录 | “探索者”全地形机器人自主设计大赛 | 全地形机器人自主创新设计规则 |
| 探索者全地形机器人自主创新赛思维方法教程 |
教学点 | 课程 | 详细说明 |
课前准备 | 绪论 | 电子模块简介 传感器简介 |
传感器相关功能方案 | 实验1 | 避障功能方案6 |
| 实验2 | 避障功能方案7 | |
| 实验3 | 循迹方案3 | |
| 实验4 | 测距变速方案 | |
实验5 | 智能交通方案 | |
实验6 | 倒车雷达方案 | |
| 实验7 | 速度反馈方案 | |
| 实验8 | 灰阶场地识别功能方案1 | |
实验9 | 灰阶场地识别功能方案2 | |
实验10 | 机器人格斗比赛方案1 | |
| 实验11 | 机器人格斗比赛方案2 | |
实验12 | 颜色识别功能方案1 | |
| 实验13 | 颜色识别功能方案2 | |
| 实验14 | 机械臂按颜色分拣方案1 | |
| 实验15 | 机械臂按颜色分拣方案2 | |
| 实验16 | 自平衡车方案1 | |
实验17 | 自平衡车方案2 | |
| 实验18 | 体感姿态方案1 | |
| 实验19 | 体感姿态方案2 | |
| 实验20 | 语音命令方案 | |
| 实验21 | 迎宾机器人方案 | |
通信模块相关功能方案 | 实验22 | 蓝牙视频监控方案 |
| 实验23 | NRF无线视频监控方案 | |
| 实验24 | WiFi智能车局域网控制方案 | |
| 实验25 | 远程控制系统方案 | |
| 实验26 | 温湿度远程监控方案1 | |
| 实验27 | 温湿度远程监控方案2 | |
| 实验28 | 温湿度远程监控方案3 | |
| 实验29 | 智能温控系统方案 | |
| 实验30 | 超级机器人助手方案 | |
视觉识别技术方案 | 软硬件准备 | 一、环境配置及软件安装 |
二、基础知识 | ||
实验31 | 开发例程一远程监控小车 | |
| 实验32 | 开发例程二视觉循迹小车 | |
实验34 | 开发例程三彩色目标追踪 |
《机器人电子功能设计第1册》大纲
| 教学点 | 课程 | 详细说明 |
| 课前准备 | 绪论 | 电子模块简介 主控板简介 Bigfish扩展板简介 birdmen手柄扩展板的使用 传感器简介 安装编程环境-Basra |
| 编程入门 | 实验1 | blink |
| 传感器入门 | 实验2 | 触碰开关方案 |
实验3 | 更多开关方案 | |
| 输出模块入门 | 实验4 | LED指示方案 |
| 数字量传感器的应用 | 实验5 | 数字量传感器测值 |
实验6 | 避障功能方案1 | |
实验7 | 避障功能方案2 | |
实验8 | 避障功能方案3 | |
实验9 | 避障功能方案4 | |
| 模拟量传感器的应用 | 实验10 | 模拟量传感器测值 |
实验11 | 超声波传感器测距算法 | |
实验12 | 避障功能方案5 | |
| 机器人综合调试 | 实验13 | 循迹方案1 |
实验14 | 循迹方案2 | |
实验15 | LED信号灯方案 | |
实验16 | 机器人身体平衡方案 | |
实验17 | 红外跟随方案 | |
实验18 | 悬崖躲避方案 | |
实验19 | 悬崖巡检方案 | |
实验20 | 传感器计数方案 | |
| 机器人通信 | 实验21 | Android蓝牙通信方案 |
实验22 | 操作杆方案 | |
实验23 | NRF无线遥控方案 | |
实验24 | 示教编程方案 |
| 教学点 | 课程 | 详细说明 |
| 课前准备 | 绪论 | 机械零件简介 组装工具的使用 机构图示 主控板简介 Bigfish扩展板简介 安装编程环境-Basra |
| 机械组装入门 | 实验1 | 造型设计 |
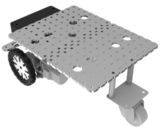
| 驱动轮模块及其应用 | 实验2 | 驱动轮模块的组装与控制 |
实验3 | 驱动轮的应用1——双轮支点结构与差速转动 | |
实验4 | 驱动轮的应用2——双轮水平支点与差速旋转 | |
实验5 | 驱动轮的应用3——双轮万向底盘与Fading程序 | |
实验6 | 驱动轮的应用4——四驱底盘与电机1拖2控制 | |
| 随动轮模块及其应用 | 实验7 | 随动轮模块的组装 |
实验8 | 随动轮的应用1——双驱拖挂底盘 | |
实验9 | 随动轮的应用2——双驱三轮底盘 | |
履带模块及其应用 | 实验10 | 履带模块组装与控制 |
实验11 | 履带的应用——履带底盘 | |
| 关节模块及其应用 | 实验12 | 关节模块的组装与控制实验 |
实验13 | 关节的应用1——2自由度云台与for循环 | |
实验14 | 关节的应用2——5自由度蛇形机器人与运动控制 | |
实验15 | 关节的应用3——六自由度双足机器人与步态控制 | |
实验16 | 关节的应用4——人车混合型机器人 | |
| 机械爪模块及其应用 | 实验17 | 机械手爪模块组装与控制实验 |
实验18 | 机械手爪的应用1——3自由度机械手 | |
实验19 | 机械手爪的应用2——1自由度排爆机器人 | |
实验20 | 机械手爪的应用3——2自由度排爆机器人 | |
实验21 | 机械手爪的应用4——3自由度排爆机器人 |
一、产品概要
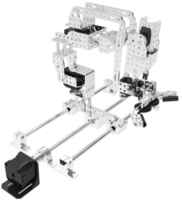
Rob-GS03是一款探索者基于机器人智能技术开发的教学平台,集合了当前主要机器人的研究技术,包含机械臂(串并联机械臂)设计及运动学控制、全向底盘设计及运动控制、仿生机器人设计及运动控制、无线定位技术、机器视觉技术、机器人激光雷达导航技术等6个主题的机器人智能技术。
结合产品设计方法和流程,采用模块化机器人开发理念将机器人智能技术转化为适合于本科的机器人智能技术教学平台。支持机器人专业、智能制造专业、其他机电相关等专业开展专业课程实践、专业拓展实践及工程教育实践。可以作为机器人机构研究、机器人智能技术研究、机器人系统研究等的设计工具。
二、设备特点
提供一套通用的金属结构件,任意组装。
可搭建机器人摆动模块、直线运动模块、球关节模块、全向轮模块等4种典型机器人模块,将模块组合可完成5种典型机械臂、5种典型仿生机器 人、2种典型全向底盘等《机器人运动学基础》中的机构设计,通过典型机器人组合可以扩展不少于20种综合类机器人构型设计。
提供三个系列控制器,满足多层级的嵌入式项目实训。
涵盖Arduino系列主控板,STM32系列主控板(STM32版本)及嵌入式控制器树莓派4B,可以支持机器人单片机应用和机器人操作系统(ROS)应用的项目实践。
提供一套机器人智能硬件。
可支持开展机器人感知系统、机器视觉、机器人定位、机器人导航等项目实践。
提供完整的教学资源,开源所有项目的源码。
提供所有机器人机构及零部件三维图纸,提供算法讲解和项目操作两本教材。
三、可开展的实践项目举例
| 项目主题 | 内容 | 实验性质 | |
第一部分 机械臂设计及运动学控制 |
直角坐标机器人设计及运动控制 | 1.设计分析-直角坐标系机械臂结构设计 | 实践 |
| 2.技术验证1-单轴机械臂绘制几何图形 | 理论+实践 | ||
| 3.技术验证2-双轴机械臂绘制特定参数图形 | 理论+实践 | ||
| 4.技术验证3-三轴机械臂绘制LOGO图形 | 理论+实践 | ||
| 5.功能性开发-激光刻绘 | 理论+实践 | ||
关节型串联机械臂运动算法 | 1.设计分析-关节型串联机械臂结构设计 | 理论+实践 | |
| 2.技术验证1-三自由度串联机械臂逆运动学控制 | 理论+实践 | ||
| 3.技术验证2-六自由度串联机械臂逆运动学控制 | 理论+实践 | ||
| 4.功能性开发-机械臂码垛 | 实践 | ||
并联机械臂设计及运动学控制 | 1.设计分析-并联机械臂结构设计 | 理论+实践 | |
| 2.技术验证1-Delta机械臂正运动学控制 | 理论+实践 | ||
| 3.技术验证2-Delta并联机械臂逆运动学控制 | 理论+实践 | ||
| 4.技术验证3-连杆并联型机械臂运动学控制 | 理论+实践 | ||
| 5.功能开发-并联机械臂码垛 | 实践 | ||
第二部分 全向底盘设计及运动控制 |
三轮全向底盘设计及运动控制 | 1.设计分析-三轮全向底盘结构设计 | 理论+实践 |
| 2.技术验证1-三轮全向底盘绘制矩形 | 理论+实践 | ||
| 3.技术验证2-三轮全向底盘绘制LOGO | 理论+实践 | ||
| 4.功能开发-多功能三轮全向底盘 | 理论+实践 | ||
四轮全向底盘设计及运动控制 | 1.设计分析-四轮全向底盘结构设计 | 理论+实践 | |
| 2.技术验证1-四轮全向底盘绘制矩形 | 理论+实践 | ||
| 3.技术验证2-四轮全向底盘绘制LOGO | 理论+实践 | ||
| 4.功能开发-多功能四轮全向底盘 | 理论+实践 | ||
第三部分 仿生机器人设计及运动控制 |
串联关节型仿生机器人设计及控制 | 1.设计分析-多自由度多足机器人结构设计 | 理论+实践 |
| 2.技术验证1-二自由度串联仿生腿结构运动控制 | 理论+实践 | ||
| 3.技术验证2-八自由度四足仿生机器人步态前进、转向 | 理论+实践 | ||
| 4.技术验证3-十二自由度六足三角步态前进 | 理论+实践 | ||
| 5.技术验证4-十二自由度六足波动步态前进 | 理论+实践 | ||
| 6.功能开发-十二自由度六足原地舞蹈 | 理论+实践 | ||
并联仿生机器人 | 1.设计分析-并联仿生机器人结构设计 | 理论+实践 | |
| 2.技术验证1-基于并连5杆机构的机器狗腿控制 | 理论+实践 | ||
| 3.技术验证2-机器狗行走步态控制实验 | 理论+实践 | ||
| 4.功能开发-机器狗行走中的平衡控制实验 | 实践 | ||
仿人形机器人 | 1.设计分析-人形机器人结构设计 | 理论+实践 | |
| 2.技术验证2-6自由度双足行走 | 理论+实践 | ||
| 3.技术验证2-17自由度人形行走 | 理论+实践 | ||
| 4.功能开发-17自由度人形舞蹈 | 理论+实践 | ||
第四部分 高级控制 |
机器人定位技术 | 1.WiFi主从模块设置 | 理论+实践 |
| 2.WiFi通信 | 理论+实践 | ||
| 3.WiFi定位 | 理论+实践 | ||
机器视觉技术 | 1.视觉颜色识别 | 理论+实践 | |
| 2.视觉形状识别 | 理论+实践 | ||
| 3.视觉二维码识别 | 理论+实践 | ||
| 4.云台追踪几何图形 | 理论+实践 | ||
| 5.机器人追踪彩色目标 | 理论+实践 | ||
| 6.人脸识别 | 理论+实践 | ||
| 7.五官识别 | 理论+实践 | ||
| 8.笑脸识别 | 理论+实践 | ||
Slam导航-基于ROS开发 | 1.Ubuntu系统安装 | 理论+实践 | |
| 2.ROS系统基础 | 理论+实践 | ||
| 3.底盘里程计实验 | 理论+实践 | ||
| 4.键盘控制底盘运动实验 | 理论+实践 | ||
| 5.地图自构建-激光雷达 | 理论+实践 | ||
| 6.地图导航-激光雷达 | 理论+实践 | ||
四、典型机器人举例
五、编程环境
3自由度串联机械臂
三轴绘图机器人
4自由度并联四足
Keil IDE
Arduino IDE
基于Ubuntu18.04-ROS
8自由度四足
8自由度并联机械狗
6自由度人形双足
全向底盘
3自由度移动机器人
12自由度六足
6轴串联机械臂
5自由度码垛机械臂
delta并联机械臂
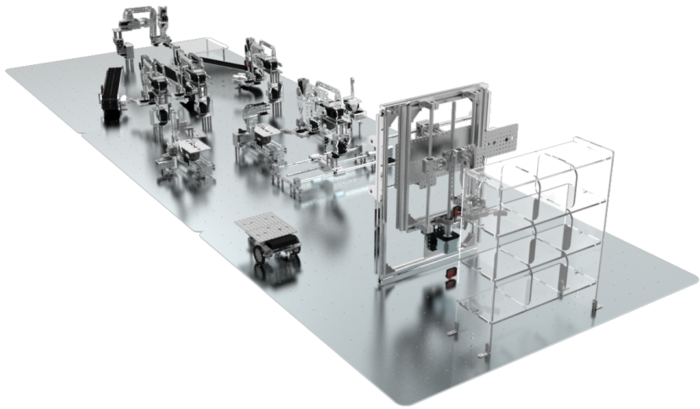
探索者智能仓储流水线IA-THU-8
设备介绍
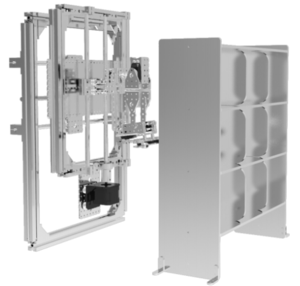
是一款组件式的柔性自动化仓储流水线设计平台,可组装典型的自动化工业设备,并组成柔性生产线,设备可以改装,生产线也可以按需要调整工序。产品提供了足够的机器零件和电子部件等,也提供了详细的组装方案,保证每台机器都可以独立运转,而控制系统可以保证生产下协调运作,从而营造出一个真实的生产线模型。
包含8个生产工艺加工流程单元,可实现通过射频装置识别工件,智能分拣、加工、AGV运输、智能入库等功能,包括:入料单元、分拣单元、传送单元、抓取单元、模拟加工单元、合并单元、AGV(运输)单元、智能仓库单元。
可以让学生认识和操作生产线,更好的锻炼学生实操经验,随意拆装、改造、设计柔性生产线,提高学生工程创新能力和应用能力。在训练过程中将智能相关基础学科内容实践,包含《单片机技术应用》、《传感器技术应用》、《嵌入式技术应用》、《机械基础》、《智能制造概论》等相关课程知识。
| 项目 | 内容 | 示例 |
入料单元设计 | 物料标签系统设计 RFID物料识别 |
|
分拣单元设计 | 搭建4自由度机械臂分拣 控制机械臂运动 |
|
传送单元设计 | 搭建传送带 控制传送带运动 |
|
抓取单元设计 | 搭建机械臂 控制机械臂运动 |
|
模拟加工单元设计 | 搭建加工单元 控制加工单元运动 |
|
合并单元设计 | 设计合并单元 控制合并单元运动 |
|
AGV(运输)单元设计 | 设计制作一个AGV单元 控制AGV单元运动 |
|
智能仓库单元设计 | 设计制作一个立体仓库单元 控制立体仓库单元运动 |
|
综合设计 |
| |
设备简介
场地中设定四种五个不同特点、不同难度的障碍物,每种障碍物均有一定的分值,参赛队根据比赛规则自主设计制作全地形小车,完成穿越各个障碍物的比赛。
障碍物分别为三种颜色的气球、楼梯、管道、窄桥,各障碍物由
黑色引导线连接,形成完整的比赛赛道,并设置比赛起点和终点,比赛场地由组委会统一布置。
全地形小车启动后自动行驶并跨越其他三种障碍物(管道,窄桥, 楼梯)后,需识别颜色板上随机色卡抽取(检录时由队员随机抽取)的一种颜色并扎破对应颜色气球(气球摆放顺序也由队员随机抽取),尺寸标记(含引导黑线、比赛起点和终点)。以通过的障碍数量和时间来综合评定成绩。
图 1:场地整体图
图2:场地地面尺寸图
(1)场地地面为 408cm×175cm(尺寸误差±3cm) 的宝丽布(如图 2),四周有高度为 18cm 的围栏。场地地面设有起点线和终止线,距离边缘 90cm。部分障碍前后20cm 设有标志线,供参赛队伍参考使用。距离长边 60cm 的两条红线为装饰线。5 个 障碍物按图 1、图 2 所示种类、数量和位置安放,并以双面胶固定在场地地面上,不可移动。黑线用 3.8cm 宽低反光绝缘胶带铺设。
(2)窄桥尺寸图: 单位:cm
材料:发泡 EVA 颜色:黑色
(3)台阶尺寸图: 单位:cm
材料:发泡 EVA 颜色:黑色
(4)管道尺寸图: 单位:cm
材料:亚克力颜色:透明
(5)气球:单位 :cm 材料:橡胶
颜色:红、蓝、绿各一个
关于窄桥和台阶障碍:表面贴磨砂砂纸。
气球布置说明(其中尺寸标注±10mm):
关于气球说明:
气球颜色为:深红、深绿、深蓝
气球大小(宽):22cm 和 26cm 之间,测量宽度方向以下图黑线示意为参考(横向最宽距离);
气球安装角度:气球横放,气嘴朝向终点线反方向,气球底面中部与场地布紧贴,气球 与场地布通过粘度较高的双面胶固定(以侧向拍打不掉落为准),气球固定位置距离气球底面中点误差5cm;
关于扎气球的装置说明:扎气球装置末端可采用细小尖锐物体,如曲别针、图钉、牙签等,机器人上场前将对扎气球装置进行检验;
关于挡板布置,如下图蓝色外框(其中尺寸标注误差±10mm)
关于色卡:色卡长×高=100mm×200mm,表面覆亚光膜,竖直放置在地面上。
近水平铺设的赛场尺寸为 2400mm×2400mm 正方形平面区域(如图 2-2 所示),赛场周围设有一定高度的挡板,仅作为场地边界标识(颜色和高度不做任何要求),不宜作为寻边、定位等其它任何用途。赛道地面为亚光白色或黄色等底色,地面图案由线宽为 20mm(边界除外)、线中心距为 300mm 的黑色方格组成。在比赛场地内,设置出发区、返回区、原料区、粗加工区、半成品区、精加工区、库存区。其中机器人初赛主要经过原料区、粗加工区和半成品区完成粗加工物料的搬运过程;机器人决赛主要经过半成品区、精加工区和库存区完成精加工物料的搬运过程。出发区和返回区的尺寸均为 300×300(mm))颜色分别为蓝色和褐色;原料区和库存区的尺寸(长×宽×高)为580×145×(80-100)(mm)白色亚光的双层货架,初赛时原料区的高度为 100mm, 物料采用颜色识别; 决赛时库存区的货架高度在80-100mm 范围 ,采用条形码识别物料放置的位置,其顶面有外径为φ(物料直径)+15 的圆形区域,用于确定物料是否摆放到位(如图2-3 所示);粗加工区和精加工区的尺寸(长×宽)为 580×150(mm);半成品区的尺寸(长×宽×高)为 580×150×45 及 580×140×0(mm)的台阶区域(如图 2-4 所示);粗加工区、半成品区、精加工区顶面上均有用于测量物料摆放位置准确程度的色环,色环尺寸如表 2-3 和如图 2-5 所示,其中φ为物料最大直径(单位:mm),φ1-φ5 为色环 1-5 环的外径,色环线宽为 1.5mm。除标注尺寸外,其余色环的直径差为 10mm。
图 2-2 机器人初赛赛场示意图
图 2-4 半成品区示意图
图 2-5 色环的尺寸
图 2-3 原料区和库存区示意图
表 2-3 环号及环尺寸与分数对照表
| 环号 | 1 环(φ1) | 2 环(φ2) | 3 环(φ3) | 4 环(φ4) | 5 环(φ5) | 6 环(φ6) | 6 环外及物料倾倒 |
| 外径尺寸 | φ+3 | φ1+5 | φ2+7 | φ3+10 | φ4+10 | φ5+10 | |
| 分数 | 15 | 10 | 7 | 5 | 3 | 1 | 0 |
机器人初赛时,竞赛场地内给定原料区、粗加区和半成品区的具体位置,如图 2-2 所示。
机器人决赛时,场地中的出发区、返回区、半成品区、精加工区、库存区的具体位置根据现场发布的任务设置。
|
|